Automated Evaluator For PCT-MMSE Using Computer Vision Techniques
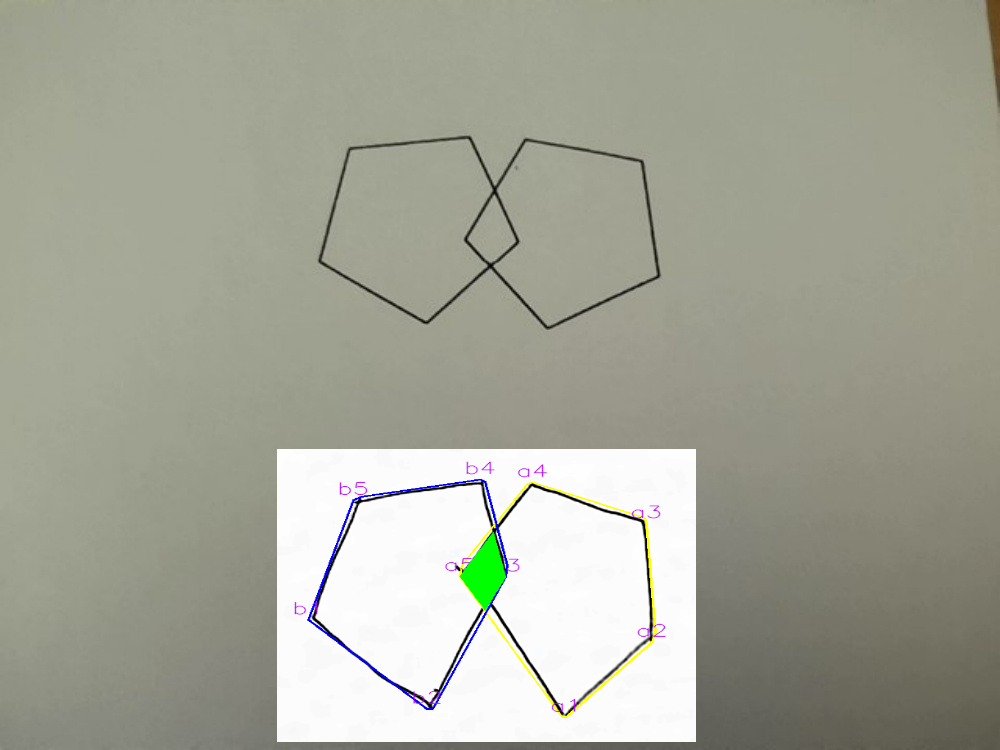
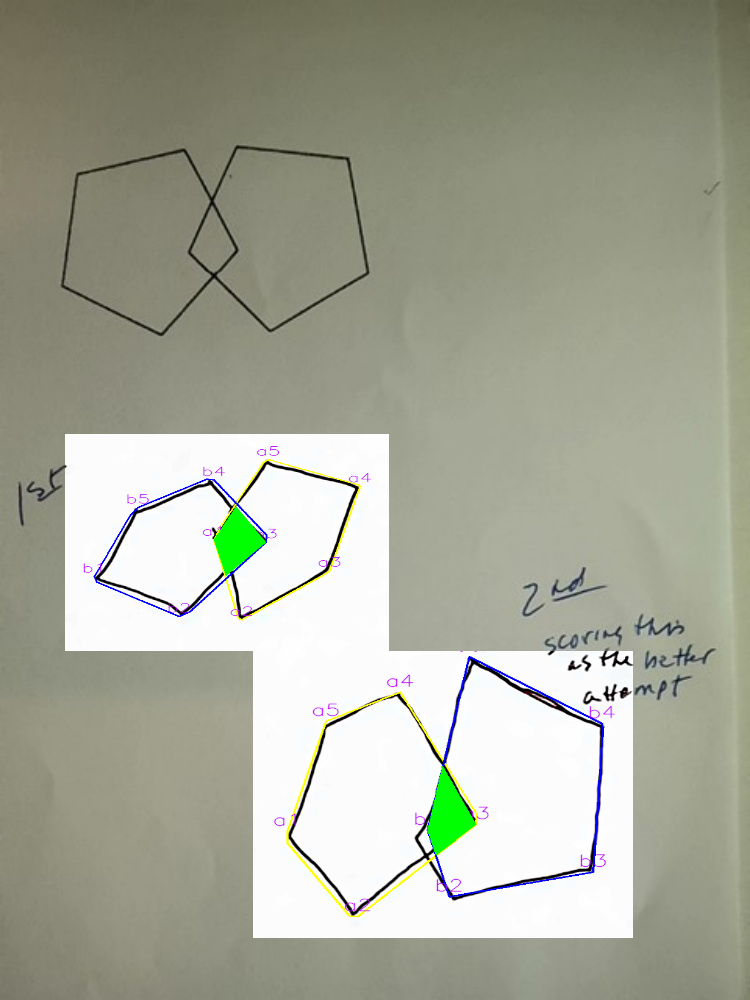
Designed and deployed a classical computer vision pipeline to automate scoring of the MMSE Pentagon-Copying Test for Alzheimer’s cognitive assessment.
- Implemented preprocessing with illumination normalization, adaptive thresholding, morphology, and Canny edge detection.
- Built geometric reconstruction using Hough Transform, custom line merging, convex hull, polygon approximation, and intersection analysis.
- Developed a search-based unravelling algorithm to separate overlapping pentagon structures under noisy drawing conditions.
- Integrated a custom-trained YOLOv8 object detection model with 90–92% mAP@50 to isolate hand-drawn ROIs prior to evaluation.
- Delivered a deterministic, production-ready scoring module with structured reporting.
- Improved agreement with baseline annotations from 60% to ~76–80% by re-engineering evaluation logic using structured geometric reasoning and rule-based validation.